 Ask an Engineer
Ask an EngineerActuator know-how for machine design engineers, Part 2
By Andrew Zaske on November 3, 2020
Machine designers face a variety of options when selecting linear actuators. It all comes down the best fit for the application: what solution provides the best results at a cost– effective price. Our previous blog covered the ABCs of actuator selection: Whether to choose rod or rodless; the primary factors for size selection; and the differences in screw technology.
This time, we’ll review:
- Selecting the right actuator: Calculating actuator life (rod and rodless)
- Motor selection: Servo or stepper (and gearboxes)
- Motor selection: Motor mounting (or Your Motor Here)
For complete details, download our eBook. It’s a ready reference to help you specify electric linear actuators in your next machine design project.
And, for even more detailed explanation, watch our webinar, “Actuator know-how for machine design engineers”
Specifying actuators boils down to answering these simple questions:
- What needs to be moved?
- How far and fast does it have to go?
- How much does the load weigh and where is it positioned?
- How much space is available for the system?
- What are the force requirements?
- Selecting the right actuator: Calculating actuator life (rod and rodless)
(Content provided by Nathan Anderson, applications engineer, Tolomatic)
One basic question for actuator selection is: How much work can an actuator do and how long will it last?
There are basic calculations for life expectancy as it relates to ball screws and roller screws. We’ll review the basics, but for complete details, check out our 15-page Guide for estimating actuator life:
Four points to consider are:
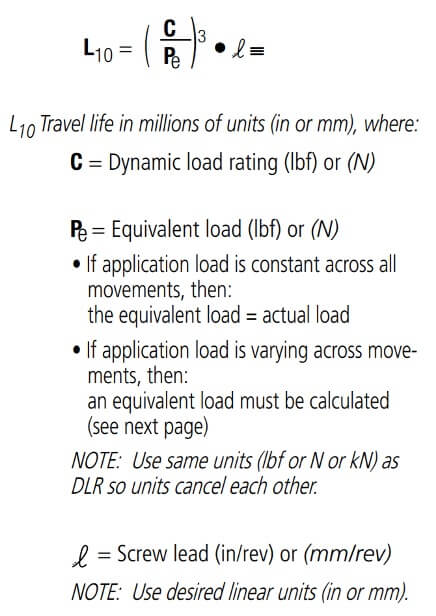
1. L10 estimates for ball screws and roller screws
L10 is a calculation of life at which 10% of the bearings in that application can be expected to have failed due to classical fatigue. (Or alternatively, the life at which 90% will still be operating.) This is a recognized standard life metric for bearings, screws, etc.
2. Load factors for linear bearing systems (rodless)—Actuator life depends on combined loads, motion parameters and operating conditions. Rodless actuators often have some form of bearing system for the carriage, and there will be a service life on these bearings that depend on the loads, speeds, forces and frequency. Unfortunately for belt driven actuators, there are no real life calculations available from the belt manufacturers due to the wide variety of applications and conditions.
3. Variables affecting actuator life: Lubrication, velocity, temperature, uneven wear, corrosion, contamination and misalignment or vibrations are all factors affecting actuator life. Like a car, your actuator lasts longer if you take care of it. With proper maintenance, most of these variables can be controlled or at least managed.
4. PV limits for solid nuts/ACME screws— PV limit is a function of pressure and velocity. Any material which carries a sliding load is limited by heat buildup. The factors that affect heat generation in an application are the pressure on the nut in pounds per square inch and the surface velocity in feet per minute. As a result, these screws will typically be used in lower duty cycle types of applications. The screws are ‘cost effective’ but have a lower life expectancy.
- Motor selection: Servo or stepper (and gearboxes)
(Content provided by Enrique Lugo, regional sales manager, Tolomatic)
What drives the actuators? Typically, servo and stepper motors are used for linear actuators to get the most out of their precision and have the ability to quickly change direction or stop at any point. Electric actuators with stepper motors offer excellent performance and lower cost for low-speed, high-torque and high-repeatability applications with open-loop control. Servo actuators perform well in higher speeds and in force-sensitive applications. Reduced machine downtime, reduced energy consumption, and increased precision and speed are factors that may influence the selection between stepper- or servo-powered electric actuators.

Stepper
- Open loop, no feedback
- High torque at low speeds
- Lower cost
Servo
- Closed-loop control (more accuracy)
- Maintain torque through speed range
- More complex and expensive
Our white paper on how to choose stepper- or servo-driven actuators will provide more details.
- Motor selection: Motor mounting (or Your Motor Here)
(Content provided by Tim Niedzielski, applications engineer, Tolomatic)
You have a motor and gearbox; how do you mount it to your actuator? This sounds like a minor detail compared to the other calculations required to get to this point; however, this is a key detail. Ensuring you have the correctly sized motor coupler and the right hole pattern to attach your gearbox or motor is critical. We’ve saved the easiest answer for last. Tolomatic’s program, “Your Motor Here,” makes that calculation for you. You’ll save time and money, as well as ensure a simple mechanical implementation. Select from over 70 motor manufacturers and 3,000 motor models. That’s over 300,000 combinations of motor and actuator.
And if your motor isn’t listed, contact us, and we’ll quote a custom motor mount.
Tolomatic has many resources to help guide you through the process.
10 tips for specifying actuators
Checklists for sizing rod style and rodless actuators
And, you can always ask an engineer for help with your application.